FD-V6S
保持焊枪位置和姿势不变的情况下,可以改变机器人的姿势;7轴机器人的复杂示教,通过运用协调技术,实现简单的手动操作;将焊接电缆内藏于第7轴机构中,示教作业时不需要担心电缆与夹具及工件的干涉。
产品样本下载使用说明书下载
产品详情
| 构造 |
垂直多关节型 |
| 轴数 |
7 |
| 手臂*大可搬重量 |
6kg |
| 位置重复精度 |
±0.08mm(注1) |
| 驱动方法 |
AC伺服马达 |
| 驱动容量 |
3600W |
| 位置反馈 |
绝对值编码器 |
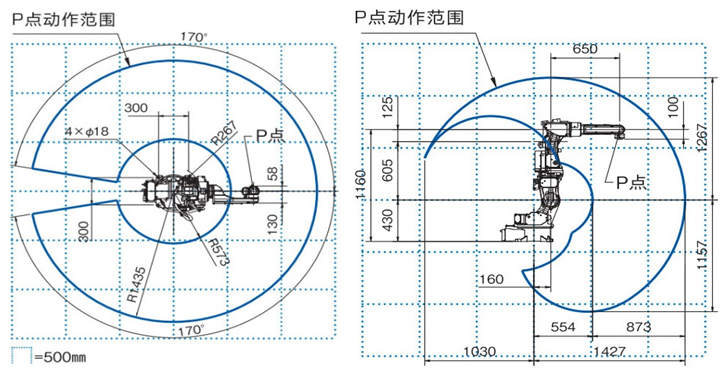
| 动作范围 |
基本轴 |
J1(旋转1) |
±170° |
| J2(前后) |
-145°~+70° |
| J7(旋转2) |
±90° |
| J3(上下) |
-170°~+149° |
| 手臂轴 |
J4(回转) |
±180° |
| J5(摆动) |
-50°~+230° |
| J6(扭转) |
±360° |
| *大速度 |
基本轴 |
J1(旋转1) |
3.66rad/s{210°/s} |
| J2(前后) |
3.66rad/s{210°/s} |
| J7(旋转2) |
3.14rad/s{180°/s} |
| J3(上下) |
3.66rad/s{210°/s} |
| 手臂轴 |
J4(回转) |
7.33rad/s{420°/s} |
| J5(摆动) |
7.33rad/s{420°/s} |
| J6(扭转) |
10.82rad/s{620°/s} |
| 手臂负荷能力 |
允许扭矩 |
J4(回转) |
11.8N.m |
| J5(摆动) |
9.8N.m |
| J6(扭转) |
5.9N.m |
| 允许惯性矩 |
J4(回转) |
0.30kg.m² |
| J5(摆动) |
0.25kg.m² |
| J6(扭转) |
0.06kg.m² |
| 机器人动作范围截面面积 |
2.58m² ×340° |
| 使用环境条件 |
温度:0~45℃、湿度:20~80%RH(无结露) |
| 本体重量 |
178kg |
| 上部手臂可载重量 |
10kg(注3) |
| 安装方法 |
地面(注4) |
| 本体颜色 |
白色(芒赛尔色标10GY9/1) |
注1:位置重复精度遵照JIS B 8432 是标准的工具中心点(TCP)测量值
注2:第6轴的动作范围可能因第5轴的姿势而受到限制
注3:上部手臂可搬重量随着*大可搬重量可以变化
注4:需要侧挂、吊装规格时请咨询我司销售人员





免责声明:当前页为 机器人焊接系统FD-H5/FD-V6S广州荣旭欧地希日本OTC品牌工业机器人产品信息展示页,该页所展示的 机器人焊接系统FD-H5/FD-V6S广州荣旭欧地希日本OTC品牌工业机器人产品信息及价格等相关信息均有企业自行发布与提供, 机器人焊接系统FD-H5/FD-V6S广州荣旭欧地希日本OTC品牌工业机器人产品真实性、准确性、合法性由店铺所有企业完全负责。世界工厂网对此不承担任何保证责任,亦不涉及用户间因交易而产生的法律关系及法律纠纷,纠纷由会员自行协商解决。
友情提醒:世界工厂网仅作为用户寻找交易对象,就货物和服务的交易进行协商,以及获取各类与贸易相关的服务信息的渠道。为避免产生购买风险,建议您在购买相关产品前务必确认供应商资质及产品质量。过低的价格、夸张的描述、私人银行账户等都有可能是虚假信息,请您谨慎对待,谨防欺诈,对于任何付款行为请您慎重抉择。
投诉方式:fawu@gongchang.com是处理侵权投诉的专用邮箱,在您的合法权益受到侵害时,请将您真实身份信息及受到侵权的初步证据发送到该邮箱,我们会在5个工作日内给您答复,感谢您对世界工厂网的关注与支持!